

























Combining biomimicry with artificial intelligence technology
ASU researchers see creative solutions springing from research on the collective cognition of social insects

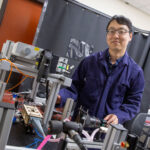
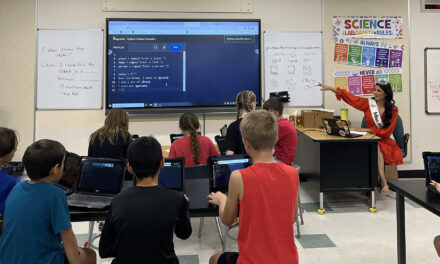
Workers from a colony of the Novomessor cockerelli species of ant forage in a nest in Associate Professor Ted Pavlic’s ASU laboratory. ASU researchers study how various colonies of ants coordinate to solve challenges, manage risks to the colony collectively, and efficiently divide labor. These studies are inspiring new ways for humans and their technology to operate effectively in challenging environments. Photographer: Erika Gronek/ASU
To the untrained human eye, the behavior of ants and similar insects appears to be determined by basic instinct with little to no actual intelligence involved.
Not so, says Ted Pavlic.
“There are maybe as many as 20,000 species of ants in the world, but people tend to think every ant is like every other ant. But in many ways, there is a lot of diversity among the ants,” says the associate professor, who teaches industrial engineering and computer science and engineering in the School of Computing and Augmented Intelligence, part of the Ira A. Fulton Schools of Engineering, and biology and animal behavior in the School of Life Sciences in The College of Liberal Arts and Sciences at Arizona State University.
When it comes to what humans can learn from nature, ants and other social insects — including many species of bees and wasps — have a lot to teach us, Pavlic asserts.
A close examination of the ways social insects communicate, their behavioral patterns and decisive and coordinated efforts to solve problems affirm insects are a source of valuable knowledge, says Pavlic, who is also the founding associate director of research for ASU’s Biomimicry Center, among many related affiliations.
The collective intelligence of social insects demonstrated by the coordinated actions of their tightly integrated colonies can even provide templates for engineers and scientists who are making advances in autonomous systems that can be used to benefit human communities in numerous ways.
In Pavlic’s Science and Engineering of Autonomous Decision-making Systems, or SEADS, Lab, for instance, he and a group of multidisciplinary researchers are examining how animals make sense of uncertainty in their environments. The researchers’ investigations include how colonies of ants and bees confront and deal with various challenges and threats, and how those adaptations might inspire new innovations in engineered systems.
By unlocking the workings of the distributed autonomy in ants, bees and wasps’ decision-making and behavior, humans can learn to adapt such discoveries for our own uses — particularly in how we develop integrated autonomous systems. That might include increasing the autonomy of drones, improving the efficiency and scalability of networked systems in the built environment or making human social networks more resilient to misinformation.
“We can take what we learn from how nature deals with situations involving multiple moving parts when coordinating actions in response to various problems,” Pavlic says. “We can look, for instance, at how animals make decisions when facing uncertainty in their environments, and then we can use what we learn to provide a template for improving the responses of our own autonomous systems in various fluctuating situations.”
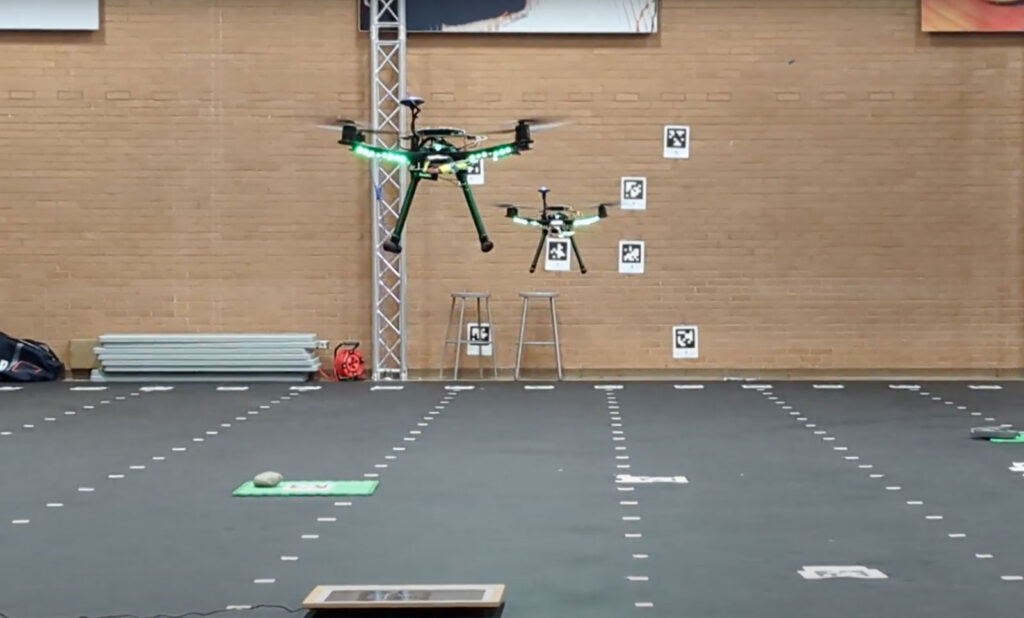
Two customized drones are shown autonomously searching the ASU Drone Studio for objects of different types. By studying the social behaviors of insects and other animals, ASU researchers are developing novel algorithms that extend the capabilities of drone swarms and other networked systems. Photo courtesy of Ted Pavlic/ASU.
Using artificial intelligence to enhance automated systems
Pavlic and his research colleagues are particularly interested in taking advantage of the expanding capabilities of artificial intelligence, or AI, technology to guide decisions and actions when dealing with conundrums and unpredictability when faced with uncertain circumstances.
Some of those endeavors involve innovative use of AI to design and develop machine learning and automation systems that enable a kind of ecological biomimicry road map to effectively guide and manage a complex project.
Pavlic sees possibilities for eventually creating extensive guides to use the robust powers of AI to design maximally efficient infrastructure and ways to boost the productivity of automated systems.
“We might someday be able to do things like operate a major manufacturing facility aided by 1,000 worker robots that can monitor their environment and communicate among themselves and to people,” Pavlic says. “They would be able to help everyone respond to problems in the same ways some insects and other animals can anticipate hazards in their environments and take protective actions.”
Pavlic and ASU colleagues Spring Berman and Jennifer Fewell have been working together with an industry partner, Boston Fusion Corporation, on several related projects funded by U.S. Department of Defense agencies aimed at broadening the applications of bio-inspired AI to improve the performance of autonomous systems technologies in challenging environments.
Berman is an associate professor of mechanical and aerospace engineering in the School for Engineering of Matter, Transport and Energy, part of the Fulton Schools. Fewell is the associate dean of faculty in The College of Liberal Arts and Sciences and a President’s Professor in ASU’s School of Life Sciences. She specializes in studies of insect societies.
Their goal is to use autonomous systems to support extensions in the capabilities of human field operators without increasing the operators’ cognitive burden to manage the systems’ autonomy, Pavlic says.
Modeling rescue operations on the behavior of social insects
Berman is the director of the Autonomous Collective Systems, or ACS, Laboratory, which uses interdisciplinary approaches to design control strategies for large-scale autonomous multi-robot systems that enable them to exhibit collective intelligence and self-organization.
In part of her work with Pavlic, Berman focuses on developing multi-robot control approaches that can be used to aid search and rescue operations by locating victims of disasters and providing them with supplies and medical treatment.
These operations will be performed by small aerial robots such as quadcopters, which are highly maneuverable platforms equipped with four rotors that can be flown safely and effectively in a variety of natural and built environments.
Pavlic and Berman’s graduate students have been working together to program a group of quadcopters with social-insect-inspired controllers and test them in the ASU Drone Studio.
The goal is to implement controllers that use inputs from a suite of lightweight, onboard sensors, such as cameras and inertial measurement units, to enable a swarm of such copters to search an environment efficiently, avoid collisions and detect victims on the ground. They could also collaborate to deliver water, food and medicine to victims and recruit nearby robots to help with other tasks as needed.
“The robot control policies have parallels to behaviors exhibited by social insects when they forage or search for a new nest site,” Berman says. “The insects can find food and potential nest sites in a very robust way in environments that are previously unknown to them because they’ve evolved to be able to do this. That’s the basic idea behind the strategies that we’re developing for the robots.”
The high-level specifications of such search and rescue operations could be determined by human supervisors, while the robots would autonomously perform low-level functions to carry out the operations.
“For example, if a person wants to change the overall mission of the robot swarm, they can broadcast the updated parameters or commands to all the robots with just a few lines of code on a computer,” Berman says.
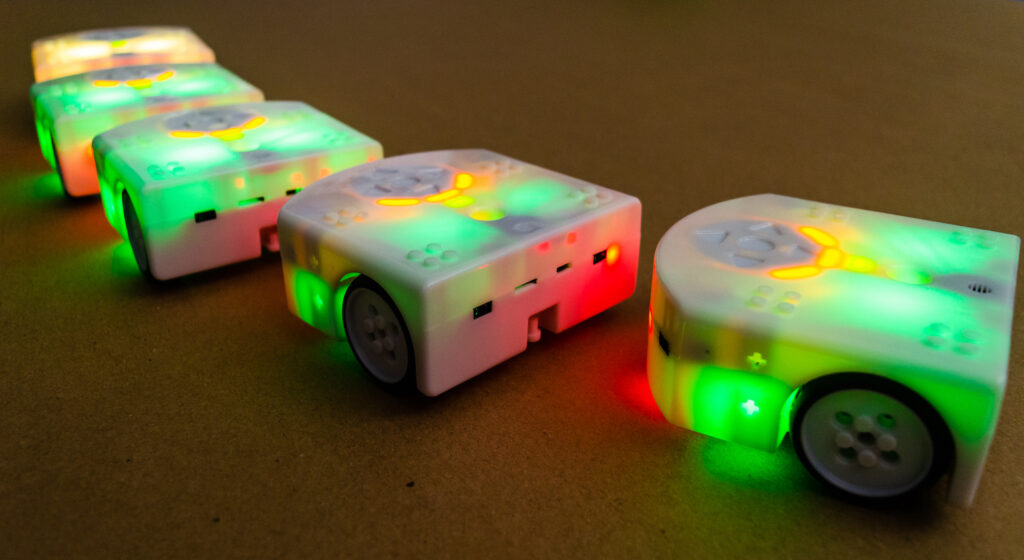
A set of low-cost, consumer-grade, educational toy robots move together in a convoy in the Pavlic lab. By studying collective intelligence, ASU researchers can build algorithms that perform well in teams but that can be implemented on individual platforms that are inexpensive and expendable. Photo courtesy of Ted Pavlic/ASU
Using bio-inspired AI to expand search for solutions
Fewell’s recent work has been used as a template for bio-inspired AI algorithms and robot controllers developed by Pavlic and Berman.
In one study, Fewell demonstrated how seed-harvester ant colonies amplify information about true threats but are organized to naturally damp false alarms. She foresees the possibility of NASA and the U.S. Department of Energy using this research to employ the robots’ biomimicry capabilities.
“I could see NASA wanting to use autonomous robots for extraterrestrial exploration in challenging environments on other planets,” Fewell says. “The Department of Energy might be interested in the robots’ abilities to coordinate mapping and monitoring of areas serviced by specific power grids.”
In addition, a graduate student who Fewell and Pavlic mentor is using laboratory methods to understand how ant colonies adjust their division of labor to become more energetically efficient the larger their colonies become.
Pavlic says it’s too soon to tell whether the work-sharing principles they are discovering in ant colonies can be applied to guide management of growing human organizations. But as the number of diverse researchers at ASU grows, he adds, it’s likely interdisciplinary pursuits like his collaboration with Berman and Fewell will continue to increase the rate at which the university produces new innovations.





{kind=link}