


























BIRTH Lab looks to nature to inspire better robots
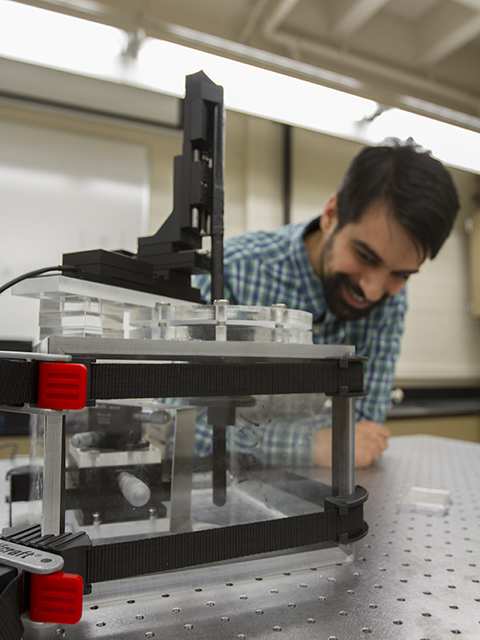
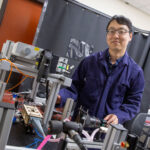
Above: Hosain Bagheri, a doctoral student working in the Bio-Inspired Robotics, Technology and Healthcare (BIRTH) Lab explains the setae-inspired structures the lab is developing to achieve switchable adhesion for space robotics. The pictured apparatus is designed to test friction and adhesion of these tiny, synthetic fibrillar structures in a vacuum as well as at extreme temperatures for use in space exploration. The technology draws inspiration from setae — small, hair-like protrusions on geckos’ feet. This gives geckos the incredible ability to stick to any vertical or inverted surface. Photographer: Pete Zrioka/ASU
For as long as humans have been inventing, we have looked to the natural world for inspiration.
The Wright brothers based their pioneering concept of wing warping on the movement of birds’ wings in flight. The idea for Velcro famously came to engineer George de Mestral after observing burrs stuck to his dog’s fur. The kingfisher’s wedge-like beak and head became the basis for a more efficient and less disruptive design of the Shinkansen bullet train.
This method of drawing on the time-tested and effective strategies of nature is known as bio-inspiration.
Hamid Marvi, an assistant professor of mechanical and aerospace engineering, has been cribbing from nature since he earned his doctorate from Georgia Institute of Technology. He’s brought this approach to the Ira A. Fulton Schools of Engineering in the form of the Bio-Inspired Robotics, Technology and Healthcare (BIRTH) Lab.
“Do you have a complex engineering problem?” asks Marvi, a faculty member in the School for Engineering of Matter, Transport and Energy. “Look to nature to see what, if any, biological systems have already addressed this problem and then analyze these systems or strategies for engineering adoption.”
Marvi stresses that research in the BIRTH Lab is not out to copy a biological system.
“That’s simply not feasible, nor would it be interesting work,” says Marvi.
Instead, the goal is to find inspiration and understand the fundamental principles behind nature’s effective systems or strategies so researchers can enhance and refine them for robotic application, according to Marvi.
For example, an efficient, truly all-terrain robot has long eluded roboticists. To remedy this, researchers at the BIRTH lab are identifying animals that successfully move through dry and wet granular media — in other words, sand and mud. Once the morphological and locomotion patterns of such animals are characterized, Marvi and his team hope to develop technologies for an all-terrain robot. A robot with this capability would prove invaluable in search and rescue, military use and even exploration.
Organisms that meet the desired criteria are known as “champion” animals, and the BIRTH Lab is currently looking to lizards as their top performers in sand.
The BIRTH Lab is constructing a custom test bed to evaluate the performance of these organisms — and eventually their robotic counterparts — on sand or mud. High-speed cameras will track markers on a lizard or robot to gather data on how the subject moves.
“Using this set up, we’ll be able to track things like impact, drag and takeoff of the animal interacting with the sand,” says doctoral student Hosain Bagheri.
The test bed is also able to control the level of saturation to simulate a range of environments. This could potentially lead to the development of adaptable robots.
“There are a lot of robots designed for a specific task or goal in mind,” says Bagheri. “It would be very interesting and beneficial to develop a robot that could change its morphology in accordance with a given environment — explore the unexplorable.”
In addition to their studies of terrestrial animals, the BIRTH Lab is also researching animals that excel in water or air to inspire smart surfaces that could actively reduce drag.
The lab is also working on smart skins with grip features in a vacuum and at extreme temperatures for use in space exploration. The technology draws inspiration from geckos and their incredible ability to stick to any vertical or inverted surface. This is thanks to setae — small, hair-like growths on geckos’ feet. The BIRTH Lab is developing setae-inspired structures to achieve switchable adhesion for space robotics.
“In essence, this lab is what engineering is all about,” says Bagheri. “We study nature and see how we can implement it for the betterment of humanity.”
In addition, the BIRTH Lab is taking their expertise in robotics and seeing what applications they can find for it in healthcare. For instance, one project is focused on untethered micro robots that could be used for microsurgery or drug delivery and controlled externally, says Marvi.
The work is not necessarily bio-inspired, but aligns with Marvi’s goals for the lab.
“What we learn from nature is transposed onto robotics and in turn we take that and use it to benefit biology — namely us,” says Marvi.
For more information about the research ongoing at the BIRTH Lab, visit them online.
Media Contact
Pete Zrioka, [email protected]
480-727-5618
Ira A. Fulton Schools of Engineering





{kind=link}