

























Smart transportation systems need to reckon with rogues

Above: ASU’s Make Programming Simple Lab has developed the first algorithm enabling autonomous vehicles to safely navigate intersections in real-world conditions. This innovation accelerates the shift from human-driven cars to fully automated transit. Photographer: Erika Gronek/ASU
Traffic is a hassle. Everyday drivers endure the tedium of gridlock induced by road construction or accidents at intersections. Hence the hope for a future driven by autonomous vehicles. We anticipate intelligent transportation systems delivering smooth movement, improved safety as well as a broad range of economic and environmental benefits.
“Of course, the transition is not going to be sudden,” says Aviral Shrivastava, a professor of computer science in the Ira A. Fulton Schools of Engineering at Arizona State University. “For an extended period of time, we will have both autonomous and human-driven cars. So, it’s essential that we develop traffic management systems to accommodate very complex interactions. This is especially true for intersections.”
Road network research focuses on intersections because over half of all traffic injuries or fatalities happen at intersections or near them, according to the Federal Highway Administration. As a consequence, more than 120 recent studies related to autonomous vehicles investigate how to maintain fluid transit through intersections.
Shrivastava explains that the overall process involves a computer known as an intersection manager or IM. As each car approaches an intersection, it contacts the IM to say something like “I’m at this spot right now, moving at this speed and I want to go straight or turn left through your intersection.”
The IM then makes a reservation for this car to arrive at the intersection at a specific time, going at a specific speed and crossing by a prescribed route, all while making sure it won’t collide with any previously scheduled cars approaching the same area.
After receiving the data points of its reservation, the inbound vehicle determines an optimal trajectory for getting to the intersection and lets the IM know what it plans to do. This plan is essentially a position-versus-time graph that specifies where the car should be at any point in time.
The approaching vehicle then follows its planned trajectory to the intersection and continues through it as instructed. But what if things don’t go as planned?
Expecting the unexpected
“We have algorithms that allow cars to cross intersections efficiently and without stopping,” Shrivastava says. “But how realistic are they? If we want to implement intersection management systems in the real world, they need to be very robust against several kinds of failures.”
Imagine that an IM gives detailed instructions to an approaching car, but that car doesn’t follow the plan. Maybe it needs to take evasive action to avoid a collision before it arrives at the intersection. Or maybe it has a sensor problem that means it misreports its speed or its location.
“Independent of the reason, it just does what it does, and it’s not what is expected,” Shrivastava says. “We need a system that is robust enough to get cars safely through intersections even when faced with these uncertainties. So, that is what we have created.”
Shrivastava and his team at the Fulton Schools’ Make Programming Simple Lab have developed an algorithm to deal with situations in which any car can start accelerating or braking at any point in time relative to transiting an intersection. Their innovative research has been selected for presentation in September at the 2020 Intelligent Transportation Systems Conference of the Institute of Electrical and Electronics Engineers.
The innovative work is conceptually different from previous research, which created IM algorithms that function only in ideal settings. The ASU algorithm — R2IM, which stands for robust and resilient intersection management — reflects the real world because it allows cars to do arbitrary things and still maintains the safety of all vehicles involved.
“Our approach uses a surveillance system, such as cameras mounted at an intersection, that can detect if a vehicle is not following its expected trajectory beyond a tolerance limit,” says Mohammad Khayatian, who is the lead author of the study and a doctoral student in Shrivastava’s lab at the School of Computing, Informatics, and Decision Systems Engineering, one of the six Fulton Schools
“If that’s the case,” he says, “the intersection manager declares that vehicle as ‘rogue.’”
The IM then alerts all approaching cars about a possible emergency, and they react accordingly. Even so, safety is already guaranteed through the scheduling of crossing times for all approaching vehicles. There are enough built-in buffers that an accident becomes impossible even if a vehicle goes rogue at any point in time.
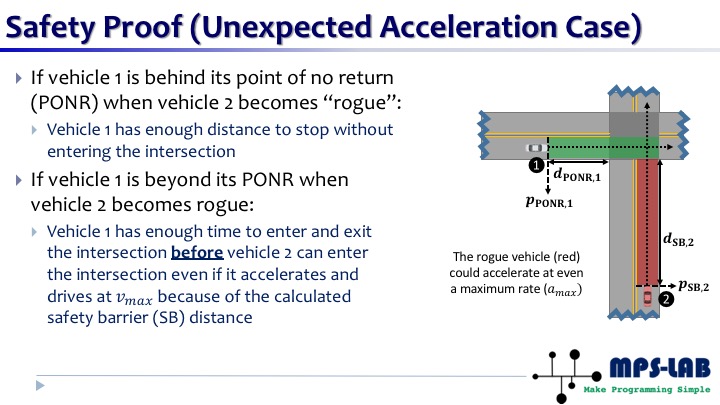
The R2IM algorithm precludes collisions by operating with times and distances that enable safe intersection crossings even when autonomous vehicles behave unexpectedly. Image courtesy of MPS-LAB
The MPS Lab team has evaluated the function of the R2IM algorithm by building a 1/10 scale model intersection and injecting faults into small electric autonomous vehicles that navigate through this scene. The faults force cars to unexpectedly accelerate or decelerate on the track and thereby enable the IM to demonstrate that it will not compromise the safety of any vehicles.
“We then checked the scalability of our approach for a real intersection through computer simulation with variable traffic patterns,” Khayatian says. “In total, 500 faults were injected during 20 hours of traffic, out of which 110 faults could have caused an accident. Even so, all collisions were avoided.”
Finally, Shrivastava’s team confirmed that the algorithm enables the IM to recover the intersection’s normal operations after a rogue vehicle leaves or has been removed from the area once the emergency situation is resolved.
“I see this effort as a first step to getting intelligent intersection management systems deployed in real life,” Khayatian says. “The next round of research is focused not just on intersections. It moves toward a complete solution for autonomous driving systems, incorporating cooperative lane changing, highway merging and more.”
Transforming ideas into reality
Shrivastava says the Phoenix metro area has become an important hub of autonomous car research. There are now more than 10 companies in the region engaged in autonomous vehicle development.
“Government here is receptive to, and supportive of, this field of innovation,” he says. “Also, we have great infrastructure for this work with straight roads, new signage and lighter traffic than many other urban centers. Finally, there is the weather. It’s almost always sunny, so the technology doesn’t face challenges from rain, snow or fog. As a whole, the Phoenix area is an ideal operational domain for autonomous vehicle testing.”
More broadly, the MPS Lab conducts computer science research to transform smart energy grids and smart city systems as well as smart transportation networks from ideas into reality.
Shrivastava says these systems are large and complex, so they are difficult to program. Consequently, the focus of their work is making this programming easier. The benefits that these systems promise become possible only when the programming becomes manageable.
The R2IM algorithm was tested on a 1/10 scale model intersection, and there were no collisions even when faults were injected to force these small autonomous cars to behave unexpectedly. Video courtesy of MPS-LAB





{kind=link}