



























Ankle analysis reveals the dynamics of walking
ASU engineering researcher uses robotics and statistical analysis methods to understand ankle impedance for better rehabilitation and human-robot interaction

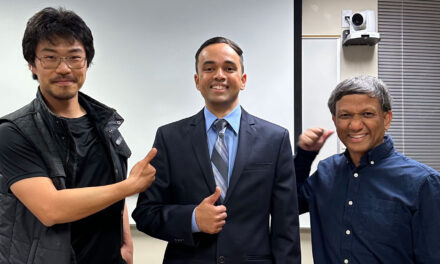
Above: Arizona State University Assistant Professor Hyunglae Lee (right) combines expertise in robot-aided neurorehabilitation and neuromuscular control of human ankles, shoulders and other joints to develop innovative platforms for understanding and aiding human health. Photographer: Erika Gronek/ASU
Walking is just putting one foot in front of the other, but there are complex biomechanical factors taking place throughout each step — especially in the ankle.
Hyunglae Lee, an assistant professor of mechanical and aerospace engineering in the Ira A. Fulton Schools of Engineering at Arizona State University, took a unique approach to researching the ankle’s dynamic movement during walking.
The results of this work — developed in collaboration with Elliott Rouse, an assistant professor of mechanical engineering at the University of Michigan, Ann Arbor, and Hermano Igo Krebs, a principal research scientist at Massachusetts Institute of Technology, and originally published in 2016 in the IEEE Journal of Translational Engineering in Health and Medicine — is helping improve rehabilitation and human-robot interaction applications.
“Outcomes of this and related studies will not only contribute to the scientific advancement of our understanding of normal and pathological ankle behavior during various real-life task conditions, but also the development of assistive or rehabilitation devices capable of providing optimal support without hindering natural lower extremity function,” says Lee, who has built upon this research over the past several years.
As the second-highest cited work over the past five years in the IEEE Journal of Translational Engineering in Health and Medicine, this year Lee’s 2016 paper earned the 2nd Prize in the IEEE Engineering Medicine and Biology Society Prize Paper Awards.
Analyzing ankles
The technique of walking, or gait, is made up of two main parts. The stance phase involves the foot that stays on the ground while the swing phase involves the other leg that swings forward to take the next step.
Ankle joint impedance — the relationship between the joint position and the force of rotation in motion — is a fundamental part of the human neuromuscular system that explains the energy exchanges that occur while walking.
“Quantification of this property is critical in understanding the stability of the human body as well as the quality of walking function,” Lee says. “Until we published this work, almost all previously reported work on the quantification of ankle impedance was strictly limited to static posture conditions, such as seated and quiet standing positions, and there was no systemic way to quantify ankle impedance during dynamic walking.”
In those studies, researchers used motion analysis, 3D motion capture and force plate sensing systems to comprehensively understand ankle biomechanics, but these methods don’t allow for the study of impedance. So, Lee and his collaborators developed a different approach.
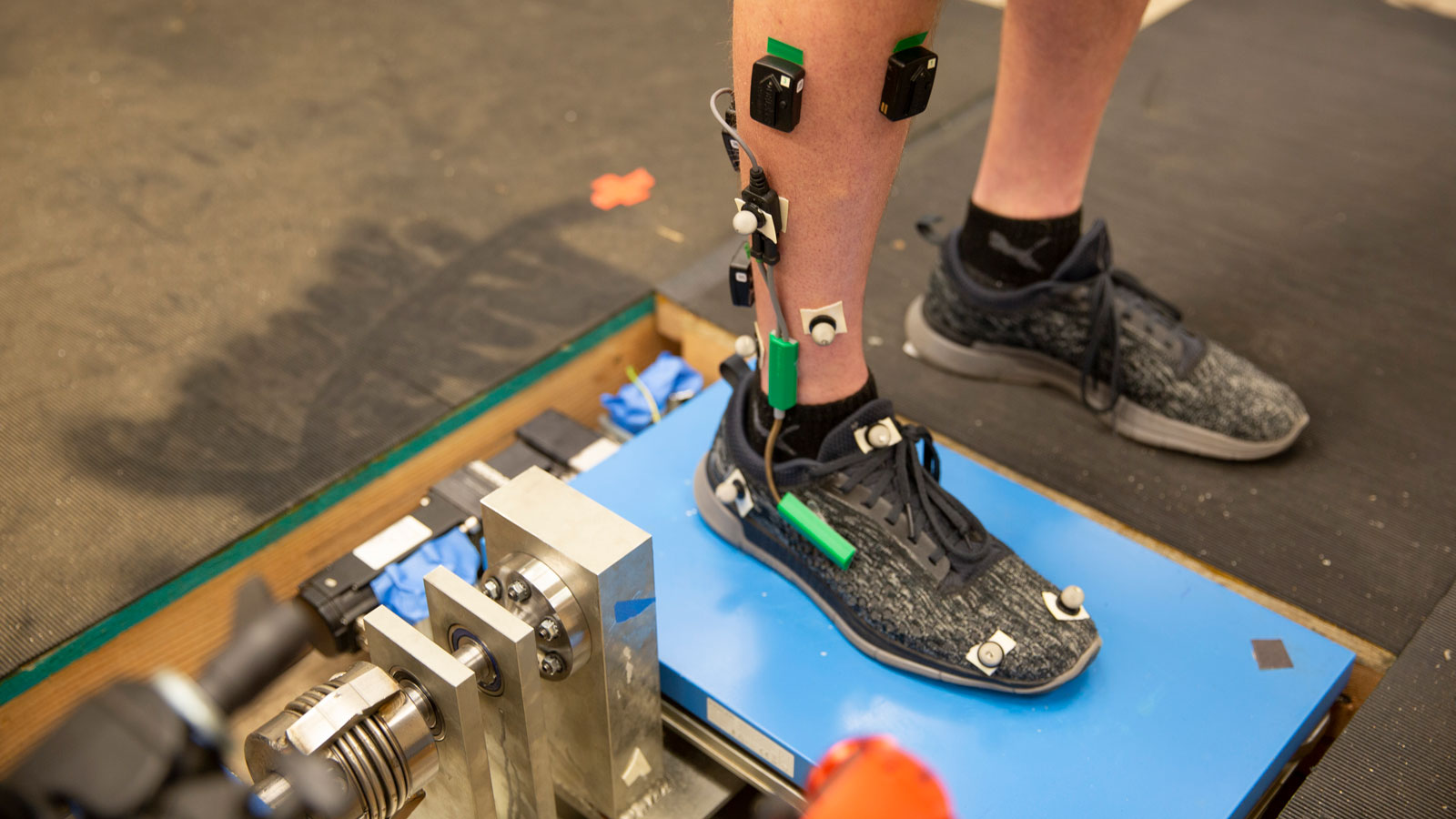
Their system, described in the award-winning 2016 paper, involved two robotic platforms: one recessed into the ground on which a research subject could walk, and another that is worn on the ankle and introduces perturbations to the ankle throughout the stance and swing phases of walking.
Then the team used system identification to quantify ankle impedance through the analysis of input perturbations and the corresponding output responses.
“This integrated approach allowed us to reliably characterize ankle impedance throughout the full gait cycle during walking, which is not achievable in the traditional motion analysis settings,” Lee says.
When compared to static poster studies, the reliability of Lee and his collaborators’ method was just as effective and reliable in quantifying impedance. They also found that ankle impedance could be approximated accurately through three components: the stiffness of the ankle joint, the ability to absorb perturbations (damping) and the tendency to remain in motion or at rest (inertia). The data showed ankle stiffness underwent the most adjustments during the gait cycle.
“Joint stiffness is one of the main focuses in controlling human-interactive robots and administering neurorehabilitation for functional improvement,” Lee says.
A robotic platform developed by Lee’s research team. It includes novel features such as the ability to actuate the ankle in multi-dimensional space and simulate various compliant surface conditions. Lee is using the platform for follow-up studies to investigate ankle impedance in healthy and impaired gaits during various tasks. Photographer: Erika Gronek/ASU
Rehabilitating ankles and advancing robotic interactions
This enhanced understanding of ankle biomechanics is helping with robotic rehabilitative and assistive devices, including prosthetics, exoskeletons and balance training platforms. For use in helping people with walking impairments, the data from the impedance profiles of healthy individuals could be used as a baseline to help create training exercise interventions to correct altered ankle behavior.
Lee has been building upon this prior research in his lab, the Neuromuscular Control and Human Robotics Laboratory at ASU, to investigate ankle impedance under various dynamic task conditions with people who have healthy gaits and in others with neurological impairments such as stroke or multiple sclerosis.
His lab team also uses the approach they developed for ankle impedance to study other limb and joint impedance.
“For example, we are currently working on the quantification of shoulder joint impedance and upper-limb impedance, which will be used to develop a new robot-aided rehabilitation framework for shoulder rehabilitation, and a high-performing yet safe and stable upper-limb exoskeleton robot for industrial applications,” Lee says.
The first project is supported by a National Science Foundation Faculty Early Career Development Program (CAREER) Award and the second project he is working on with Sze Zheng Yong, an assistant professor of mechanical engineering, with the support of an NSF National Robotic Initiative, or NRI, award.
Beyond human health and augmentation applications, the research findings from Lee’s original paper can also be used in robotics. Robotic impedance controllers are popular for allowing robots to have controlled limb movements, which is especially important for human-robot interaction. The paper’s findings can be directly used to innovate these robotic impedance controllers.

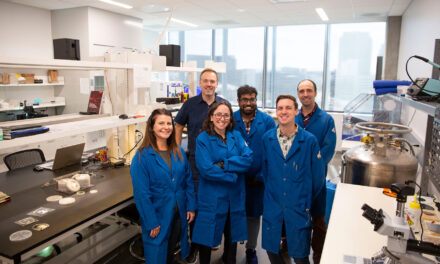
A student in Lee’s Neuromuscular Control and Human Robotics Laboratory demonstrates the Transparent Robotic-Aided Rehabilitation framework for exercise therapy. This robotics platform, developed with funding from a National Science Foundation Faculty Early Career Development Program (CAREER) Award, will improve the effectiveness of robot-aided rehabilitation for stroke survivors. Photographer: Erika Gronek/ASU
The start of a prolific robotics and rehabilitation career at ASU
The 2016 paper published in the IEEE Journal of Translational Engineering in Health and Medicine was Lee’s first journal publication as an ASU faculty member in the School for Engineering of Matter, Transport and Energy, one of the six Fulton Schools.
He has had many research successes since then, including earning a 2019 NSF CAREER Award, a 2021 New Investigator Award from the Arizona Department of Health Services and winning the Wearable Robotics Association 2020 WearRAcon Innovation Challenge with his students who developed a soft robotic ankle foot orthoses for active stroke rehabilitation.
“The Fulton Schools and [School for Engineering of Matter, Transport and Energy] Director Lenore Dai have been supporting me in many ways to continue and expand my research and start several new colleagues in the Fulton Schools and outside with clinical collaborators in the valley,” Lee says. “And my academic mentors [in the School of Biological and Health Systems Engineering, another of the Fulton Schools] Marco Santello, Thurmon Lockhart and James Abbas have supported me and acknowledged the potential of my research. Of course, all these research projects would not have been possible without the hard work of current and past students in my lab.”




{kind=link}