

























ASU team’s robot driver in top-10 at Cornell Cup competition

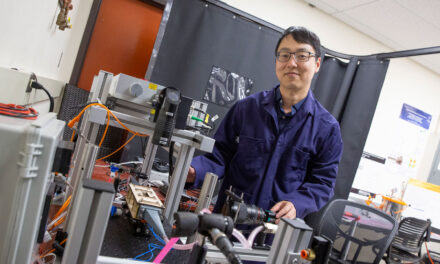
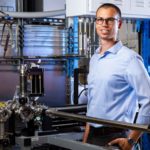
Joe Boeding, left, and Bijan Fakhri, members of the ASU team at the Cornell competition, pose with the robot they taught to drive a car.
A student team from the Ira A. Fulton Schools of Engineering at Arizona State University, which taught a robot to drive an electric car, placed in the top 10 of 34 finalists at the Cornell Cup USA, an embedded technology competition presented by Intel.
The Cornell Cup competition is patterned after the Intel Cup China competition, which ASU students also will participate in. You can read about that competition here: Fulton students invited to Intel Cup competition in China. The Cornell Cup team received an honorary award.
The annual competition, designed to encourage students to use embedded technology, provided teams with Intel development boards featuring Atom processors.
At the competition, held May 1-3 at Florida’s Walt Disney World Resort, teams vied for up to $10,000 and recognition for design, innovation and entrepreneurship.
ASU’s six-member team was led by Sami Mian, and included Joe Boeding, Ryan Sterry, Mila Arezina, Cameron Stewart, and Bijan Fakhri, all seniors in computer systems engineering.
The work was the students’ senior capstone design project, which is also a project of ASU’s Sun Devil Robotics club. The team’s advisors were assistant professor Georgios Fainekos and senior lecturer Yinong Chen in the School of Computing, Informatics, and Decision Systems Engineering. Fainekos mentored the team and provided resources and Chen facilitated and reviewed the designs.
The project, called Nao Navigators, used Nao, an autonomous, humanoid robot developed by Aldebaran Robotics, a French robotics company headquartered in Paris. Nao, a robot with a body shaped like a human, can operate on its own with minimum or no human intervention. It can be programmed before or during operation.
The Defense Advanced Research Projects Agency, or DARPA, chooses a technological issue that it believes needs a solution and sets a grand challenge. The challenge for this competition was to use humanoid robots in disaster zones.
ASU’s Cornell Cup team was inspired by the challenge and a love for robotics. The team members also wanted to figure out how robots could help in disaster relief efforts, so they decided to teach Nao to drive a small electric car.
The idea is to use robots to perform tasks in environments that are too dangerous for humans. A robot can walk to a site, but if it is a long distance, it would need transportation, which would require greater power and capabilities. To drive, the robot must use the steering wheel and acceleration pedal of the car. It also must be able to avoid obstacles and use three-dimensional vision. It also needs to be able to respond to general and common events, such as stopping the vehicle at a red signal, or moving over when another vehicle approaches.
Equipment and supplies also may have to be transported by the robot to the disaster area. And the robot may have to operate heavy machinery vehicles at the disaster site.
The project became easier with new embedded technologies such as laser range finders and Microsoft’s Kinect sensor for Xbox that simulates stereoscopic vision. The robot system uses Intel’s Atom processor running Robot Operating System on Linux.
The team split the project into four stages: simulation, prototyping, programming and testing. Team members worked on it from mid-September until the competition. They plan to improve the software and hardware framework of the robot, and hope that one day human-sized robots will be able to operate any type of vehicle.
Written by Mayank Prasad
Media Contact Judy Nichols, [email protected]
(480)965-9248
Ira A. Fulton Schools of Engineering




